Yêu cầu thiết kế mạch điều khiển
Đối với mạch điều khiển bộ chỉnh lưu thì việc thiết kế không phải chỉ có tính toán thông số mà việc thiết kế cũng được kiểm tra hết sức cẩn thận.
Gồm có 2 sơ đồ trong bộ điều khiển nghịch lưu bao gồm có:
– Sơ đồ điều khiển bộ nghịch lưu.
– Sơ đồ khối chức năng.
Và trong thiết kế mạch điều khiển chính lưu bao gồm có 3 khâu:
– Khối đồng pha (ĐF)
– Khâu so sánh (SS)
– Khâu khếch đại và sửa xung.

Sơ đồ biểu diễn yêu cầu mạch điều khiển
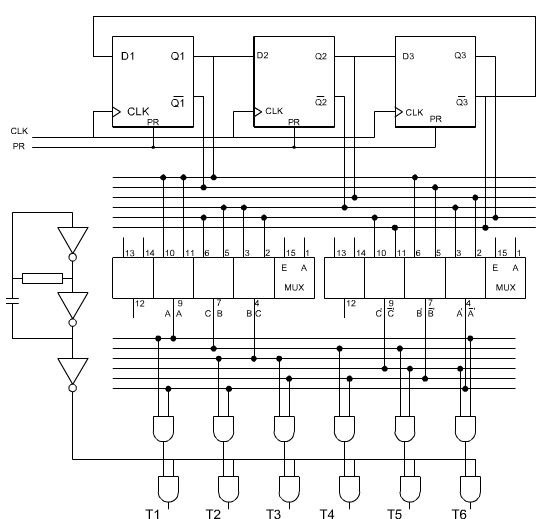
Để tạo ra xung phát lần lượt vào T1, T2, T3, T4, T5, T6 cách nhau pi/3 hay góc dẫn của mã Tiristor là 120 độ.
Từ đó ta có thể tạo ra 3 xung A, B và C lệch nhau 120 độ. Dịch các xung này đi 60 độ ta được các xung A’, B’ và C’ tương ứng. Để tạo được xung phát T1, T2, T3, T4, T5, t6 ta chỉ việc đưa các xung ban đầu và các xung đã dịch đi 60 của nó vào mạch AND để rồi từ đó thỏa mãn dạng xung cần có.
Từ nhận xét trên và qua bảng trạng thái ngõ ra của thanh ghi dịch 6 bit ta thấy:
– Các tín hiệu A, B, C lần lượt được lấy từ các đầu ra Q1, Q3 và Q2.
– Các tìn hiệu A’, B’, C’ lần lượt được lấy ra từ các đầu ra Q2, Q1 và Q3.
– Xung phát T1 = Q1 AND Q2, T2 = Q2 AND Q3, T3 = Q3 AND Q1, T4 = Q1 AND A2, T5 = Q2 AND Q3 AND Q1.

– Bộ FFX ngoài nhiệm vụ phát xung tuần tự đến các Tiristor như trên còn có nhiệm vụ phân phối xung trong các chế độ tương ứng của động cơ là: Động cơ quay thuận, động cơ quay ngược, chế độ hãm tái sinh.
– Giả sử giản đồ phát xung đã trình bày ở trên là dùng để phát cho BBĐ cung cấp dòng cho động cơ làm việc ở chế độ chạy thuận. Để động cơ quay ngược ta chỉ cần đổi thứ tự phát xung vào các Tiristor bằng cách đổi pha B cho pha C. Việc này được thực hiện dễ dàng bằng MUX 74157 được trình bày như trên.
– Để hãm tái sinh năng lượng, phải mồi chậm các Tiristor của bộ nghịch lưu do đó làm giảm tốc độ số bộ nghịch lưu sao cho động cơ quay quá tốc độ đồng bộ và trở thành máy phát. Trong chế độ hãm tái sinh ta chỉ cần đảo các xung A’, B’ và C’. Việc này cũng được thực hiện bằng vi mạch dồn kênh MUX 74157 được trình bày.
+ Bộ trộn xung:
Xung từ bộ FFX được trộn với xung đến từ bộ dao động bằng mạch AND để đi tới bộ KĐX.
+ Bộ khếch đại xung:
– Bộ KĐX làm nghiệm vụ khếch đại xung điều khiển có biên độ và độ rộng thích hợp cho việc điều khiển mở Tiristor.
– Mạch KĐX được thực hiện bằng BAX.
Đối với các yêu cầu trên thì mạch điều khiển khá phù hợp cho các thiết bị cầu trục với tần suất làm việc lớn.






 Cầu trục
Cầu trục Cổng trục
Cổng trục Palang
Palang Bàn nâng hạ
Bàn nâng hạ Gầu ngoạm
Gầu ngoạm Xe con
Xe con Phụ kiện
Phụ kiện Điều khiển
Điều khiển Cầu đường
Cầu đường